 |
 |
| 恾俀丂僑儈塣斃儘儃僢僩 | 恾俁丂僑儈敔儘儃僢僩乮慜柺乯 |
| 丂 | |
 |
|
| 恾係丂僗僞乕僩埵抲桿摫價乕僐儞 | |
| 慜暸傊 | 栚師傊 | 師暸傊 |
| Abstract : Various robots have been developed to improve our living environment. Robots cannot move around freely in the area with barrier. Education using robots has possibility of giving us new views of our living environments. Educational robot BontenMaru is a useful teaching material to learn robots for students unfamiliar with robots. Makimono language has specially designed for children to make programs of BontenMaru. The computer language can help for the untrained students to make easily programs of a micro-controller in Japanese Hiragana commands. A set of partner robots was created with BontenMaru kits. A garbage truck carried small trash for us to a garbage can robot, and the garbage can robot received the trash automatically. Creating the original partner robots gave new conception for improvement of our living environment. | |
| Key Words: | Educational Robot, BontenMaru, Micro-controller, Environmental Education, Partner Robot |
| 丂 | 嫵堢梡儘儃僢僩丄瀽揤娵丄儅僀僋儘僐儞僩儘乕儔丄娐嫬嫵堢丄僷乕僩僫乕儘儃僢僩 |
丂
丂変乆偺廃埻傪庢傝姫偔條乆側娐嫬偼擔堦擔偲曄傢偭偰偄傞丅摿偵丄嬤擭偺壢妛媄弍偺恑曕偵敽偆惗妶娐嫬偺曄壔偼挊偟偄丅娐嫬嫵堢偲偄偊偽帺慠娐嫬偵傑偢栚偑峴偔偑丄擔忢偍偐傟偰偄傞恎嬤側惗妶娐嫬偵娭偟偰峫偊傞偙偲傕廳梫偱偁傞偲巚傢傟傞丅偦傟偱偼丄惗妶娐嫬傪峫偊傞偲偼偳偆偄偆偙偲偩傠偆偐丅幵堉巕巊梡幰偺栚偐傜廃埻偺惗妶娐嫬傪尒捈偡丅偙傟傕丄恎嬤側娐嫬嫵堢偺堦偮偲峫偊偰椙偄偺偱偼側偄偩傠偆偐丅寬忢幰偐傜尒傟偽丄側傫偺曄揘傕柍偄傛偆側抜嵎偱傕幵堉巕偱偼墇偊傞偙偲偑擄偟偄偙偲偑偁傞丅僗儘乕僾偝偊偁傟偽戝忎晇偩傠偆偲埨堈偵峫偊傞幰傕偄傞偐傕偟傟側偄偑丄庤摦偱幵堉巕傪憖嶌偡傞応崌偵偼丄僗儘乕僾偑彮偟偱傕偒偮偔側傞偲搊傞偙偲偼偱偒偢丄偝傜偵壓傝偼忋傝偵斾傋婋尟搙偑傛傝崅偄丅偄傢備傞僶儕傾僼儕乕偵娭偡傞栤戣偱偁傞丅尰嵼偺堏摦宆儘儃僢僩偺戝敿偼幵椫傪巊偭偰偄傞偨傔丄幵堉巕偲摨條偵偪傚偭偲偟偨婲暁偼堏摦偺忈奞偵側偭偰偟傑偆丅傕偪傠傫丄抜嵎傪忔傝墇偊偨傝丄旔偗傞婡擻傪帩偨偣傞偙偲傕偱偒傞丅偟偐偟丄偙偙偱拲栚偡傋偒偼丄幵堉巕偲儘儃僢僩偐傜尒偨僶儕傾僼儕乕娐嫬偺椶帡惈偱偁傞丅偙偺傛偆側偲偙傠偵丄儘儃僢僩偺娽偐傜尒偨娐嫬嫵堢偺壜擻惈偑偁傞偲峫偊傜傟傞丅懠曽丄儘儃僢僩帺懱偑帩偭偰偄傞娐嫬夵慞偺壜擻惈傕偁傞丅儘儃僢僩偵偼丄恖娫偵擄偟偄嶌嬈傗扨弮嶌嬈偺孞傝曉偟側偳傪恖娫偺戙傢傝偵偝偣傞偙偲偑偱偒傞丅偙傟傜偼丄儘儃僢僩傪棙梡偟偨條乆側娐嫬偺夵慞偺堦抂偲峫偊傜傟傞丅傑偨AIBO乮SONY惢乯側偳偺儁僢僩儘儃僢僩偺奐敪偲晛媦偵傛傝丄儘儃僢僩偺怴偟偄懁柺傕尒偊偰偒偨丅廬棃偺柍婡幙揑側儘儃僢僩偺奣擮偐傜丄尰戙恖偺怱傪桙偟偰偔傟傞儘儃僢僩偲偟偰拲栚偝傟巒傔偰偄傞丅巕偳傕偺梴堢傪廔偊偨晇晈偺怴偟偄僐儈儏僯働乕僔儑儞偺庤抜偲偟偰偺梫朷傕偁傞傛偆偱偁傞丅偙偙偵偼丄儘儃僢僩偺媅恖壔偵娭偡傞偁傞庬偺婋湝傕側偄傢偗偱側偄偑丄怱偺娐嫬偺夵慞偲偟偰峫偊傞偙偲偑偱偒側偄偩傠偆偐丅嬤偄彨棃丄恖娫偲儘儃僢僩偑嫟懚偡傞帪戙偑棃傞偲峫偊傜傟偰偄傞丅偙偺傛偆偵丄條乆側懁柺偐傜儘儃僢僩偲惗妶娐嫬傪娭楢偯偗傞偙偲偑偱偒傞丅儘儃僢僩偲娭楢偯偗偨怴偟偄娤揰偐傜尒偨娐嫬嫵堢偺壜擻惈偑偁傞偲峫偊傜傟傞丅崱夞丄嫵堢宯戝妛戝妛堾偺妛惗偵嫵堢梡儘儃僢僩嫵嵽乽瀽揤娵乿傪棙梡偟偰僷乕僩僫乕儘儃僢僩偺惢嶌傪峴傢偣偨丅儘儃僢僩偵娭偡傞嫵堢偵懳偡傞妛廗偑斾妑揑枹廗弉側幰偱傕僷乕僩僫乕儘儃僢僩偺惢嶌偑壜擻偱偁傞偙偲傪帵偟丄儘儃僢僩惢嶌偲慻傒崌傢偣偨娐嫬嫵堢偺壜擻惈傪専摙偡傞丅
丂
丂悽戙偺堘偄偼偁傞偑丄儘儃僢僩偲尵偊偽丄揝榬傾僩儉丄揝恖俀俉崋丄僈儞僟儉丄僪儔偊傕傫側偳偺條乆側傾僯儊乕僔儑儞偵搊応偡傞儘儃僢僩払傪憐憸偡傞偲巚偆丅偙傟傜偼偁偔傑偱嬻憐忋偺儘儃僢僩偱偁傞偑丄嬤擭偺儘儃僢僩娭楢媄弍偺恑曕偱丄偦傟傜偵椶帡偟偨儘儃僢僩偑幚尰偡傞壜擻惈偼偳傫偳傫崅偔側偭偰偒偰偄傞偲尵偊傞丅偙傟傜偺傛偆側儘儃僢僩傪憂傝偨偔偰丄儘儃僢僩偵娭傢傞曌嫮傪巒傔偨幰偼彮側偔側偄丅1999擭偵SONY偐傜敪攧偝傟偨將宆偺儁僢僩儘儃僢僩AIBO偺搊応偁偨傝偐傜丄杮奿揑側儁僢僩宆儘儃僢僩偑晛捠偺壠掚偵傗偭偰偔傞偲偄偆帪戙偑朘傟偰偒偨丅嵟嬤丄乽桙偟宯儘儃僢僩乿偲偄偆尵梩傕帹偵偡傞傛偆偵側傝丄廬棃偺嶻嬈梡儘儃僢僩偵戙昞偝傟傞傛偆側柍婡幙偱椻偨偄姶偠偺偡傞儘儃僢僩偲偼堎側傞僞僀僾偺儘儃僢僩偑峫偊傜傟傞傛偆偵側偭偰偒偨丅
丂儘儃僢僩偲尵偭偰傕怓乆側僞僀僾偑偁傝丄暘椶傕條乆偱偁傞丅HONDA偺P3傗ASIMO偺傛偆側僸儏乕儅僲僀僪宆儘儃僢僩丄AIBO偺傛偆側摦暔宆儘儃僢僩傪巒傔丄堦尒儘儃僢僩偵尒偊側偄傛偆側暔傑偱懡條偱偁傞丅帺摦婡夿偲儘儃僢僩偺堘偄偼壗偐偲偄偆偙偲偼偗偭偙偆擄偟偄偑丄(1)奜奅偺忣曬傪摼傞僙儞僒乕丄(2)奜奅偵懳偟偰壗傜偐偺摥偒偐偗乮弌椡乯傪偡傞傾僋僠儏僄乕僞丄(3)敾抐傪偡傞僐儞僺儏乕僞傪帩偭偰偄傞偲偄偆偺偑忦審偲偟偰峫偊傜傟偰偄傞丅偙傟傜偺梫慺傪桳偟偰偄傟偽丄昁偢偟傕宍忬偼栤戣偱偼側偔丄幵堉巕偺宍忬偱偁傞偑儘儃僢僩偺梫慺傪帩偭偨暔丄偁傞偄偼儘儃僢僩偺婡擻傪帩偭偨壠傑偱偑斖醗偵擖偭偰偟傑偆偐傕偟傟側偄丅傑偨丄崅楊幰偺栤戣側偳偑晜忋偟偰偔傞拞丄夘岇傗暉巸偵娭傢傞條乆側儘儃僢僩偺奐敪傕峴傢傟偰偄傞丅儘儃僢僩偲嫟懚偡傞帪戙偼偡偖偦偽偵棃偰偍傝丄儁僢僩儘儃僢僩傕娷傔偨條乆側僷乕僩僫乕儘儃僢僩偑偙傟偐傜搊応偟偰偔傞偵堘偄側偄丅
丂杮奿揑側儘儃僢僩傪惢嶌偡傞偨傔偵偼丄條乆側媄弍椡偑昁梫偱偁傝丄妛廗偡傞傋偒帠崁傕懡偄丅岺妛宯偺戝妛傗崅摍愱栧妛峑側偳偱偼丄揹婥丒揹巕岺妛丄忣曬岺妛側偳條乆側愱栧抦幆傪妛廗偡傞偨傔偺庼嬈帪娫偺妋曐偑壜擻偱偁傞丅偙傟偵懳偟丄嫵堢宯偺戝妛偵偍偄偰偼丄儘儃僢僩惢嶌偵娭楢偡傞愱栧揑側庼嬈偺帪娫傪廫暘偵妋曐偡傞偙偲偼擄偟偄丅偟偐偟丄彮側偔偲傕丄乽杮奿揑側儘儃僢僩偼柍棟偱傕壗傜偐偺儘儃僢僩偼嶌偭偰傒偨偄丅乿偲偄偆梫媮偵偼側傫偲偐墳偊偨偄丅彫妛峑俇妛擭崙岅偺拞偵乽恖娫偲儘儃僢僩乿偲偄偆扨尦偑偁傞丅偙偺傛偆偵丄彫丒拞妛峑偺嫵堢偵傕丄偙傟偐傜儘儃僢僩偵娭傢傞撪梕偑憹偊偰偔傞壜擻惈偼崅偄偲峫偊傜傟傞丅帺傜儘儃僢僩傪惢嶌偟偨宱尡傪帩偪丄偦偺妝偟偝傪揱偊傜傟傞嫵堳傪梴惉偟偰偄偒偨偄丅偦偺偨傔偵偼丄揔愗側儘儃僢僩嫵嵽偑昁梫偵側傞丅偙傟傑偱偺儘儃僢僩娭楢嫵嵽偲偟偰偼丄拞妛惗傪懳徾偵偟偨墦妘憖廲乮儕儌僐儞乯宆偺儊僇僯僘儉偵帇揰傪掕傔偨儘儃僢僩偑懡偐偭偨丅崅峑惗埲忋傪懳徾偵偟偨帺棩宆儘儃僢僩傕偁傞偑丄壙奿揑偵崅壙偱偁傞偲偄偆栤戣偲惂屼尵岅偑俠尵岅側偳偱偁傝丄儘儃僢僩傪妛廗偡傞慜採偲偟偰偁傜偐偠傔妛傫偱偍偔傋偒帠暱偑彮側偔側偄丅変乆偺僌儖乕僾偑奐敪偟偰偒偨嫵堢梡儘儃僢僩乽瀽揤娵乿偺妶梡偑丄弶妛幰偵傛傞儘儃僢僩惢嶌傪壜擻偵偟偰偔傟傞偲峫偊傜傟傞侾乯丅儘儃僢僩偺弶妛幰偵偍偄偰傕丄儘儃僢僩惢嶌傪妝偟傓偙偲偼壜擻偱偁傞丅傓偟傠丄弶妛幰偵偍偄偰偙偦儘儃僢僩惢嶌偑壜擻偱偁傞偙偲傪帵偟偰偄偔偙偲偑傛傝廳梫偱偁傞偲峫偊偰偍傝丄偦偺嫵堢揑側岠壥偼崅偄偲巚傢傟傞丅
丂乽瀽揤娵乿偼丄彫丒拞妛惗傪懳徾偵奐敪偝傟偨嫵堢梡儘儃僢僩嫵嵽偱偁傞乮娾杮丒悈扟丒拞懞丄1998懠乯丅儅僀僋儘僐儞僩儘乕儔乮PIC16F84乯偱惂屼偝傟丄慜曽嵍塃偵偁傞愒奜慄LED偺斀幩岝傪拞墰偺愒奜慄庴岝慺巕偱専弌偡傞偙偲偵傛傝丄慜曽偍傛傃嵍塃慜曽偺忈奞暔偺桳柍傪敾抐偡傞偙偲偑偱偒傞俀乯丅婎杮摦嶌偲偟偰偼丄僨僼傽儗儞僔儍儖僪儔僀僽偺擇椫嬱摦偵傛偭偰慜恑丒屻恑丒夞揮側偳偺堏摦峴摦偑慖戰偱偒傞丅
丂瀽揤娵偱偼乽傑偒傕偺尵岅乿偲屇傇愱梡偺惂屼尵岅傪梡偄偰僾儘僌儔儉傪嶌傞丅偙偺尵岅偱偼丄乽偩傫乿偲屇傇彫偝側僾儘僌儔儉傪廤傔偨乽偠傘偮乿偲屇傇堦偮偺僾儘僌儔儉傪嶌傞乮恾侾乯丅僾儘僌儔儉偺奺偩傫偼丄侾偮偺峴摦柦椷乮偙偆偳偆乯偲偦偺峴摦偺夞旔忦審乮偠傚偆偗傫乯偱惉偭偰偄傞丅
丂彫妛惗傪巊梡幰偲偟偰憐掕偟丄僐儅儞僪偼傂傜偑側偲悢帤偱婰弎偟偰偄傞丅乽偙偆偳偆乿偑摦嶌傪柦椷偡傞僐儅儞僪偱丄偤傫偟傫丄傒偓傑傢傟丄傂偩傝傛傟丄偙偆偟傫丄側偳偱擇椫偺僞僀儎偺摦偒傪巜帵偡傞丅僞僀儎偺夞揮懍搙偺巜掕偱丄堏摦懍搙傗夞揮偡傞懍搙側偳傪挷惍偡傞丅乽偠傚偆偗傫乿偼幚峴偟偰偄傞摦嶌柦椷偐傜敳偗弌偡乮夞旔偡傞乯忦審傪帵偟偰偄傞丅乽偩傫乿偲偄偆嵟彫偺傑偲傑傝偺拞偱乽偙偆偳偆乿僐儅儞僪傪幚峴偟偰偍傝丄乽偠傚偆偗傫乿偺惉棫偵廬偭偰丄弴師丄乽偩傫乿傪慗堏偟偰偄偔丅乽偠傚偆偗傫乿偵偼丄(1)忈奞暔傪専弌偡傞僐儅儞僪偲偟偰丄傒偓偩丄傂偩傝偩丄傑偊偩丄(2)帪娫傪寁應偡傞僐儅儞僪偲偟偰丄偠偐傫仜偱丄偦偆偠偐傫仜偱丄側偳偑偁傞丅偝傜偵乽偠傚偆偗傫乿僐儅儞僪偵丄両偑偮偔偲斲掕傪昞偡丅偨偲偊偽丄乽傒偓偩乿偼乽塃偵暔偑偁偭偨傜乿丄乽両傒偓偩乿偼乽塃偵暔偑側偐偭偨傜乿偲偄偆堄枴偵側傞丅
丂偙偺瀽揤娵偺婎杮僉僢僩偍傛傃惂屼尵岅偱偁傞乽傑偒傕偺尵岅乿偺巊梡偵傛傝丄忈奞暔偺専弌偲帪娫偺應掕傪巊偭偨僆儕僕僫儖摦嶌傪偡傞儘儃僢僩傪嶌傞偙偲偑偱偒傞丅巊梡偡傞僐儅儞僪偼摦嶌傗忦審傪楢憐偟傗偡偄帺慠側尵梩偵偟偰偄傞偺偱丄摿暿偵妛廗偡傞帪娫傪傕偆偗側偔偲傕僾儘僌儔儉傪嶌傞偙偲偑壜擻偱偁傞丅傑偨忋弎偺傛偆偵傂傜偑側僐儅儞僪偱偁傞偨傔丄彫妛惗偱傕抁婜娫偱僾儘僌儔儈儞僌偑梕堈偵偱偒傞丅
|
丗偩傫傔偄 丂偙偆偳偆 丂偠傚偆偗傫丂丗師偺偩傫傔偄 |
丂弶曕揑側瀽揤娵偺夵憿乮婡擻奼挘乯偲偟偰偼丄奜憰偺岺晇傗堏摦婳愓傪昤夋偡傞偨傔偺儁儞偺捛壛側偳偑偱偒傞乮悈扟丒娾杮丄2000b乯丅偝傜偵丄瀽揤娵偺拞悤偱偁傞儅僀僋儘僐儞僩儘乕儔乮PIC16F84乯偺巊梡壜擻乮枹巊梡乯側僨傿僕僞儖擖弌椡億乕僩婡擻傪巊偆曽朄偑偁傞丅瀽揤娵偺杮懱婎斦忋偺僺儞僿僢僟傪夘偟偰丄奜晹弌椡憰抲乮儌乕僞丒LED側偳乯偍傛傃擖椡憰抲乮僙儞僒椶乯傪愙懕偡傞偙偲偵傛傝丄婎杮僉僢僩偵僴乕僪僂僄傾揑側夵憿傪壛偊偨僆儕僕僫儖儘儃僢僩偺憂憿偑壜擻偵側傞丅
丂儅僀僋儘僐儞僩儘乕儔偺惂屼僾儘僌儔儉傪嶌傞偨傔偵偼丄捠忢偼傾僙儞僽儕尵岅傗俠尵岅側偳偺壗傜偐偺僾儘僌儔儉尵岅傪妛廗偡傞昁梫偑偁傝丄擄偟偄偲峫偊傜傟偑偪偱偁傞丅偟偐偟丄瀽揤娵偱梡偄傞傑偒傕偺尵岅偱偼乽偮偗乿丒乽偗偣乿偺偙偆偳偆僐儅儞僪偑梡堄偝傟偰偍傝丄僨傿僕僞儖億乕僩偺弌椡惂屼偑壜擻偱偁傞丅乽偮偗仜乿偱丄巜掕偟偨億乕僩仜偺僨傿僕僞儖弌椡傪High偵丄乽偗偣仜乿偱Low偵惂屼偱偒傞丅仜偼儅僀僋儘僐儞僩儘乕儔偺億乕僩斣崋偵憡摉偡傞丅瀽揤娵偺杮懱婎斦忋偵偁傞僺儞僿僢僟乕偼丄僷僜僐儞偐傜ROM儔僀僞傪夘偟偰僾儘僌儔儉傪彂偒崬傓僀儞僞乕僼僃乕僗偲偟偰巊傢傟偰偄傞偑丄偙偺僺儞僿僢僟乕傪夘偟偰枹巊梡偺僨傿僕僞儖億乕僩傪棙梡偱偒傞丅PIC16F84偺揹棳嬱摦擻椡偼崅偔丄LED掱搙偱偁傟偽僟僀儗僋僩偵ON/OFF偝偣傞偙偲偑偱偒傞丅儌乕僞傗儕儗乕側偳偺傛偆偵揹棳偑偝傜偵昁梫側僨僶僀僗傪巊梡偡傞応崌偼丄僩儔儞僕僗僞傗愱梡偺僪儔僀僶IC傪夘偣偽椙偄丅偙偺曽朄偱瀽揤娵婎杮僉僢僩偵奜晹僨僶僀僗傪惂屼偡傞婡擻傪娙扨偵捛壛偱偒傞丅
丂堦曽丄廃埻偺忣曬傪挷傋偨傝丄奜晹偐傜壗傜偐偺巜帵柦椷傪憲傞曽朄偲偟偰偼丄愒奜慄儕儌僐儞傪棙梡偡傞曽朄偑梡堄偝傟偰偄傞丅乽儕儌僐儞仜偩乿偲偄偆僐儅儞僪偱丄愒奜慄儕儌僐儞乮SONY惢乯偺僠儍僱儖愝掕怣崋乮侾乣15乯傪曎暿偟偰棙梡偱偒傞丅偙偙偱丄仜偼僠儍僱儖斣崋偱偁傞丅偝傜偵丄乽偵亊亊亊亊偩乿偲偄偆僐儅儞僪傪巊偊偽丄儅僀僋儘僐儞僩儘乕儔偺擖椡億乕僩偺忬懺傪挷傋傞偙偲傕偱偒傞丅奜晹偵岝僙儞僒傗儊僇僯僇儖僙儞僒側偳傪捛壛偡傟偽丄偦傟傜偐傜廃埻偺忣曬傪擖庤偡傞偙偲偑偱偒傞傛偆偵側傞丅
丂偙偺傛偆偵乽傑偒傕偺尵岅乿傪妶梡偡傞偙偲偵傛傝丄瀽揤娵偺拞悤偱偁傞儅僀僋儘僐儞僩儘乕儔偺妛廗偑梕堈偵側傞偲偲傕偵丄瀽揤娵偺夵憿偑壜擻偵側傞丅瀽揤娵僉僢僩偺夵憿埲奜偵傕丄儅僀僋儘僐儞僩儘乕儔帺懱偺妛廗偵棙梡偡傞偙偲偑偱偒傞揰傕偙偺嫵嵽偺枺椡偲尵偊傞丅傂傜偑側僐儅儞僪傪梡偄偨傑偒傕偺尵岅偼丄戝妛惗偵偼娙扨偡偓傞偐傕偟傟側偄偑丄僐儞僺儏乕僞尵岅偵晄姷傟側妛惗偵懳偟偰儘儃僢僩偺妛廗傪摫擖偡傞応崌丄偙偺傑偒傕偺尵岅偼戝曄桳岠偱偁傞丅偝傜偵丄傑偒傕偺尵岅娐嫬偱偼傾僙儞僽儕尵岅傕棙梡偱偒傞偺偱丄梡堄偝傟偨傂傜偑側僐儅儞僪偱楙廗傪偟偨屻偵丄偝傜偵忋媺偺妛廗偲偟偰傾僙儞僽儕尵岅偺妛廗偵恑傓偲椙偄偩傠偆丅
丂瀽揤娵僉僢僩傪幵宆偺儘儃僢僩嫵嵽偲偟偰丄尨宆偺傑傑棙梡偡傞偺偱偼側偔丄惂屼梡偺僷乕僣偲偟偰峫偊傞偙偲傕偱偒傞丅偡側傢偪丄擖椡偲偟偰愒奜慄僙儞僒傪帩偪丄弌椡偲偟偰俀偮偺儌乕僞惂屼偑偱偒傞儅僀僋儘僐儞僩儘乕儔傪搵嵹偟偨惂屼梡儃乕僪偲偟偰妶梡偡傞曽朄偱偁傞丅幚嵺丄屻弎偡傞乽僑儈敔儘儃僢僩乿偼丄瀽揤娵僉僢僩傪惂屼儃乕僪偲偟偰棙梡偟偰偍傝丄尨宆偐傜偼偐側傝夵憿偝傟偨暔偵側偭偰偄傞丅
丂
丂偙偙偱偼丄媨忛嫵堢戝妛偺戝妛堾妛惗偺庼嬈偲娭楢偝偣偰僷乕僩僫乕儘儃僢僩偺惢嶌傪峴偭偨條巕傪徯夘偡傞丅偙偺儘儃僢僩惢嶌偵偁偨傝丄僷乕僩僫乕儘儃僢僩戝夛乮戝夛挿丗搶杒戝妛戝妛堾拞栰塰擇乯偵嶲壛偡傞偙偲傪栚昗偵偟偨丅偙偺戝夛偱偼丄彫丒拞妛惗傪懳徾偲偟偨儘儃僢僩傾僀僨傿傾僐儞僋乕儖埲奜偵嫞媄晹栧偲採埬晹栧偑偁偭偨偑丄戝夛偺庯巪傗奺晹栧偺撪梕側偳傪専摙偟丄儘儃僢僩偺弶妛幰偱傕嶲壛偑壜擻偲巚傢傟偨採埬晹栧偵嶲壛偡傞偙偲偵偟偨丅惢嶌偡傞妛惗偑帩偭偰偄傞媄弍偺斖埻偱幚尰壜擻偱偁傝丄偙偺晹栧偱媮傔傜傟偰偄傞儘儃僢僩偲偟偰丄帺暘偺戙傢傝偵壗偐傪偟偰偔傟傞儘儃僢僩傪峫偊偨丅嵟廔揑偵偼丄乽昦婥傗偗偑側偳偱儀僢僪偐傜棧傟傜傟側偄恖偺戙傢傝偵丄寉偄僑儈僋僘傪棧傟偨応強偺僑儈敔偵塣傇偙偲偱僑儈幪偰偺庤娫傪徣偒丄晄曋偝傪彮偟偩偗偱傕尭傜偡偙偲偑弌棃傞傛偆偵偡傞偙偲乿傪栚揑偵儘儃僢僩傪愝寁丒惢嶌偡傞偙偲偵寛掕偟偨丅慜弎偟偨傛偆偵丄瀽揤娵僉僢僩傪儀乕僗偵偟偰丄儅僀僋儘僐儞僩儘乕儔偺擖弌椡億乕僩偺奼挘棙梡偲儕儌僐儞僐儅儞僪偺棙梡偵傛偭偰丄埲壓偵帵偡乽僑儈幪偰瀽揤娵乿傪惢嶌偟偨丅
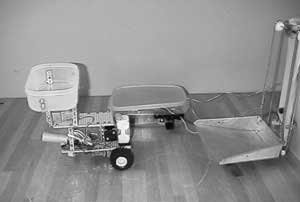
丂惢嶌偟偨乽僑儈幪偰瀽揤娵乿偼丄倎乯僑儈塣斃儘儃僢僩丄倐乯僑儈敔儘儃僢僩丄們乯僗僞乕僩埵抲桿摫價乕僐儞丄偺俁懱堦慻偱僑儈幪偰偺摦嶌傪幚尰偡傞丅俁懱偺娫偱偼丄愒奜慄儕儌僐儞怣崋乮侾乣15乯傪棙梡偟偰岎怣傪峴偆丅
丂僑儈幪偰傪峴偆堦楢偺摦嶌偼丄埲壓偺庤弴偱峴偆丅
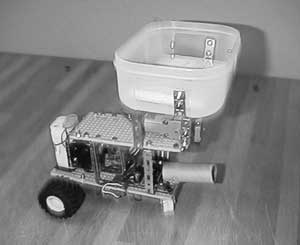
| 倎乯僑儈塣斃儘儃僢僩丗 | 瀽揤娵傪儀乕僗偵丄僑儈乮巻孄摍乯傪擖傟傞敔乮僑儈塣斃敔乯傪俀奒寶偰偺傛偆偵捛壛偟偨峔憿偵側偭偰偄傞乮恾俀乯丅僑儈塣斃敔傪傾乕儉偱巟偊丄奜晅偗儌乕僞傛傞傾乕儉偺梙摦塣摦偱僑儈傪僑儈敔儘儃僢僩偺恛庢傝偵棊偲偡丅塣斃儘儃僢僩偼丄慜晹拞墰偺愒奜慄庴岝僙儞僒偱丄僑儈敔儘儃僢僩偍傛傃僗僞乕僩埵抲桿摫價乕僐儞偐傜憲傜傟傞愒奜慄儕儌僐儞怣崋傪扵偟偰丄偦偺曽岦偵堏摦偡傞丅愒奜慄庴岝僙儞僒偵栺俆cm偺摏傪庢傝晅偗丄愒奜慄偺嶶棎岝傪彍偄偨桿摫儕儌僐儞怣崋偺捈愙岝偺傒傪専弌偡傞傛偆偵偟偨丅僑儈搳偘柦椷傪庴偗傞偲丄堏摦摦嶌傪掆巭偟丄僑儈塣斃敔傪搢偟偰僑儈傪恛庢傝偵棊偲偡丅僑儈傪棊偲偟偨屻丄僑儈塣斃敔傪尦偺忬懺偵栠偟丄偦偺応偱夞揮乮斀揮乯偟偰僗僞乕僩埵抲桿摫價乕僐儞傪栚巜偟偰堏摦傪巒傔傞丅 |
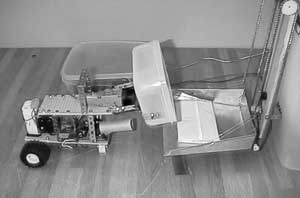
| 倐乯僑儈敔儘儃僢僩丗 | 僑儈敔晹丄恛庢傝晹丄愒奜慄儕儌僐儞怣崋敪惗晹偵傛偭偰峔惉偝傟偰偄傞丅瀽揤娵僉僢僩偺杮懱婎斦傪棙梡偟偨惂屼儃僢僋僗偱丄偦傟傜傪摑妵丒惂屼偡傞丅愒奜慄儕儌僐儞LED偐傜偼丄僑儈塣斃儘儃僢僩偺桿摫偲僑儈搳偘柦椷側偳偺怣崋傪憲傞乮恾俁乯丅惂屼儃僢僋僗偼丄瀽揤娵偺愒奜慄偵傛傞忈奞暔専弌婡擻傪巊偭偰丄僑儈塣斃儘儃僢僩偺愙嬤傪専弌偡傞偙偲偑偱偒傞丅弶婜忬懺偱偼丄僑儈敔儘儃僢僩偺埵抲傪抦傜偣傞桿摫怣崋傪敪惗偡傞丅僑儈塣斃儘儃僢僩偺愙嬤傪専弌偡傞偲丄僑儈搳偘柦椷怣崋傪憲傞丅恛庢傝偱僑儈傪庴偗偨偺偪丄恛庢傝傪儔僟乕僠僃乕儞偱帩偪忋偘丄僑儈敔偺拞偵僑儈傪棊偲偡丅恛庢傝偺嬱摦偼瀽揤娵偺堏摦梡儌乕僞傪夵憿偟偰峴偭偨丅恛庢傝偼僑儈敔偺忋抂偺崅偝偵払偡傞偲丄帺廳偱搢傟偰僑儈傪僑儈敔偺拞偵棊偲偡丅僑儈傪棊偲偟偨屻偼丄恛庢傝傪僑儈庴偗偺埵抲偵栠偟丄弶婜忬懺偵側傞丅 |
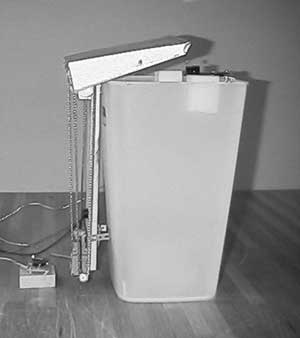
| 們乯僗僞乕僩埵抲桿摫價乕僐儞丗 | 僗僞乕僩埵抲傪帵偡愒奜慄儕儌僐儞偺桿摫怣崋傪敪惗偡傞價乕僐儞婡擻傪帩偭偨憰抲偱丄僑儈搳偘摦嶌屻偺僑儈塣斃儘儃僢僩傪桿摫偡傞乮恾係乯丅 |
|
|
| 恾俀丂僑儈塣斃儘儃僢僩 | 恾俁丂僑儈敔儘儃僢僩乮慜柺乯 |
| 丂 | |
|
|
| 恾係丂僗僞乕僩埵抲桿摫價乕僐儞 | |
丂惢嶌偟偨僑儈幪偰瀽揤娵偼丄埲壓偺庤弴偱僑儈幪偰摦嶌傪弴師峴偆丅
 |
 |
| 乮倎乯丂僑儈塣斃儘儃僢僩傪専弌偡傞 | 乮倐乯丂恛庢傝傊僑儈傪搳偘棊偲偡 |
| 丂 | |
 |
 |
| 乮們乯丂恛庢傝傪忋徃偝偣傞 | 乮倓乯丂恛庢傝傪搢偟偰僑儈傪棊偲偡 |
| 恾俆丂僑儈幪偰瀽揤娵偺僑儈幪偰摦嶌 | |
丂
 |
 |
| 乮倎乯丂僑儈塣斃儘儃僢僩偑斀揮偡傞 | 乮倐乯丂僗僞乕僩埵抲桿摫價乕僐儞傊愙嬤偡傞 |
| 恾俇丂塣斃儘儃僢僩偺僗僞乕僩埵抲傊偺婣娨 | |
丂
丂瀽揤娵傪棙梡偟偰丄媨忛嫵堢戝妛戝妛堾偺庼嬈偺拞偱僷乕僩僫乕儘儃僢僩乽僑儈幪偰瀽揤娵乿傪惢嶌偟偨丅傑偒傕偺尵岅偵傛偭偰丄儅僀僋儘僐儞僩儘乕儔偺僾儘僌儔儉傕抁婜娫偱嶌惉偱偒偨丅婎杮揑側妛廗偵壛偊偰奼挘揑側柦椷傗夵憿偺曽朄傪揔愗偵巜摫偡傞偙偲偵傛傝丄娙扨側巇慻傒偺僷乕僩僫乕儘儃僢僩偱偁傟偽丄愝寁偲惢嶌偑偱偒傞偙偲偑帵偝傟偨丅偝傜偵丄偙偺傛偆側儘儃僢僩偺惢嶌偲惗妶娐嫬偲偺娭楢惈傪峫椂偟偨庼嬈揥奐傪峫偊傟偽丄廬棃偲偼堎側偭偨懁柺偐傜娐嫬嫵堢偵敆傞偙偲偑偱偒傞偲峫偊傜傟傞丅庼嬈偺揥奐偲偟偰丄師偺傛偆側傕偺偼偳偆偩傠偆偐丅
丂
丂杮尋媶偺悑峴偼儊僇僩儘偱梀傇夛偺懡偔偺儊儞僶乕偐傜嫤椡傪摼偰峴傢傟偰偄傞偙偲傪偙偙偵姶幱偡傞丅傑偨丄杮尋媶偼丄暯惉11擭搙丒12擭搙嫵堳梴惉僇儕僉儏儔儉夵慞偵娭偡傞尋媶丒奐敪宱旓偺曗彆傪摼偰峴傢傟偨丅
丂
娾杮惓晀丒悈扟岲惉丒拞懞徃 1998 巕嫙梡儘儃僢僩嫵嵽偺奐敪丄ROBOMEC '98丂1BIII4-3
娾杮惓晀丒悈扟岲惉 1998 儊僇僩儘僯僋僗嫵嵽奐敪偲幮夛嫵堢巤愝偱偺幚慔 暯惉10擭搙揹婥娭學搶杒巟晹楢崌戝夛 2H5
悈扟岲惉丒娾杮惓晀 1998 儅僀僋儘僐儞僩儘乕儔傪搵嵹偟偨帺憱宆儘儃僢僩偺嫵嵽壔 嶻嬈媄弍嫵堢妛夛戞41夞慡崙戝夛 p.27
悈扟岲惉丒娾杮惓晀 2000a惂屼嫵嵽偲偟偰偺儘儃僢僩嫵嵽乽瀽揤娵乿偺妶梡 嶻嬈媄弍嫵堢妛夛戞43夞慡崙戝夛 C-16
悈扟岲惉丒娾杮惓晀 2000b 偍奊偐偒儘儃僢僩偲偟偰偺乽瀽揤娵乿儘儃僢僩嫵嵽 嶻嬈媄弍嫵堢妛夛戞43夞慡崙戝夛 F-5
拹
| 侾乯 | 挊幰傜偼丄儊僇僩儘傪捠偟偰巕偳傕払偲梀傇媄弍幰傪拞怱偲偟偨巗柉僌儖乕僾乽儊僇僩儘偱梀傇夛乿偲偟偰丄瀽揤娵傪巊偭偨儘儃僢僩偵娭偡傞嫵堢妶摦傪愬戜傪拞怱偵峴偭偰偄傞丅 http://www.robotics.is.tohoku.ac.jp/TORO |
| 俀乯 | 嫵堢梡儘儃僢僩瀽揤娵偼丄愬戜惗傑傟乮奐敪乯偱丄侾偮栚偺儘儃僢僩偱偁傞丅偦偙偱丄埳払惓廆偺梒柤傪偄偨偩偄偰乽瀽揤娵乿偲柦柤偟偨丅 |
丂
仏丂媨忛嫵堢戝妛嫵堢妛晹惗妶宯嫵堢島嵗丂
| 慜暸傊 | 愭摢傊 | 栚師傊 | 師暸傊 |